Martin Rudorfer

Lecturer in Robotics and AI
hi!
I am a Lecturer in Computer Science at Aston University, Birmingham. My research areas include robotic grasping and manipulation, reproducibility in robotics research, and ethical considerations in robotics & AI. I am also part of the Autonomous Robotics and Perception Laboratory.
Check out my profiles on LinkedIn and Google Scholar.
news
2022-05
Birmingham City University was hosting the Innovation Fest 2023, and I was invited to a podium discussion with Florimond Gueniat and George Diamantopoulos about AI in Engineering. It was great fun, we talked about AI applications in robotics, automotive engineering, blockchain and many other aspects!

2023-03
The TeX Talks at University of Birmingham introduced various CS & Tech topics to undergraduate students. There we speakers from industry and academia, and I was happy to give an introduction to robotic grasping and manipulation.
2023-01
In January, I attended the 4th UK Robot Manipulation Workshop, hosted by the Bristol Robotics Lab.
It was great to connect to people from the UK robotics community, plus, I presented a poster about our BURG Toolkit and even got a best poster award!

2022-10
I got invited to a discussion about teaching in higher education at my former university TU Berlin. Back then I participated in many great workshops and was able to get the qualified teaching certificate. It was great to meet former friends and colleagues and be part of the discussion!
2022-10
I am starting a new position as Lecturer (Assistant Professor) in Computer Science at Aston University!
I am delighted to join the team here at Aston and look forward to fruitful collaborations with my new colleagues. Moreover, I am happy to get back to teaching and supervising students again. A new part of my work will now also be writing project proposals, acquiring research funding, and at some point supervising my first PhD students!
2022-05
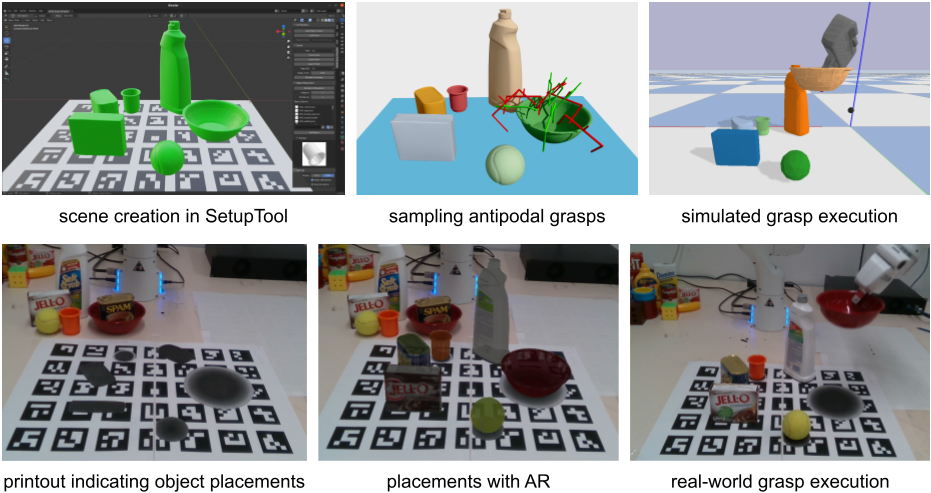
We published our BURG-Toolkit for Benchmarking and Understanding Robotic Grasping and presented it at the ICRA 2022 Workshop on Releasing Robots into the Wild.
paper: arxiv.org/abs/2205.14099
project webpage: github.io/mrudorfer/burg-toolkit
presentation: youtu.be/YumzQBb26sI?t=1560
2022-05
I was invited to talk about my research at the Facts & Snacks series of University of Birmingham.
2022-02
We submitted our paper “End-to-End Learning to Grasp from Object Point Clouds” to RA-L/IROS!
paper: https://arxiv.org/abs/2203.05585
github: https://github.com/antoalli/L2G/
2022-02
The first release of the BURG-Toolkit is public! This is a Python package for benchmarking and understanding robotic grasping.
github: https://github.com/mrudorfer/burg-toolkit/