Martin Rudorfer

Lecturer in Robotics and AI
research
My first research was in computer vision: I started with traffic sign recognition during my diploma thesis and from there moved to more general object detection and 6d pose estimation. In my PhD I focused on service-based architectures for applying these computer vision methods in a manufacturing context. My research then gradually extended to the robotics domain, first in the context of assembly tasks with known objects and later focusing more on data-driven methods for robotic grasping of novel objects. One aspect of that is the benchmarking of grasping and manipulation methods to foster comparability and reproducibility of experimental results.
Follow the links in the pictures to learn more about the topics.
data-driven robotic grasping
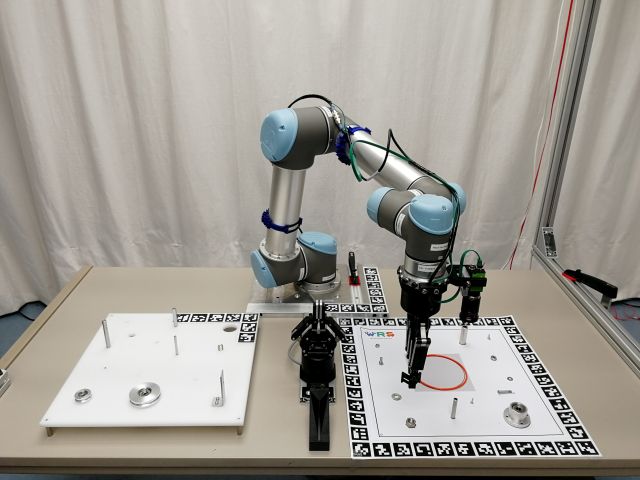
robotic assembly
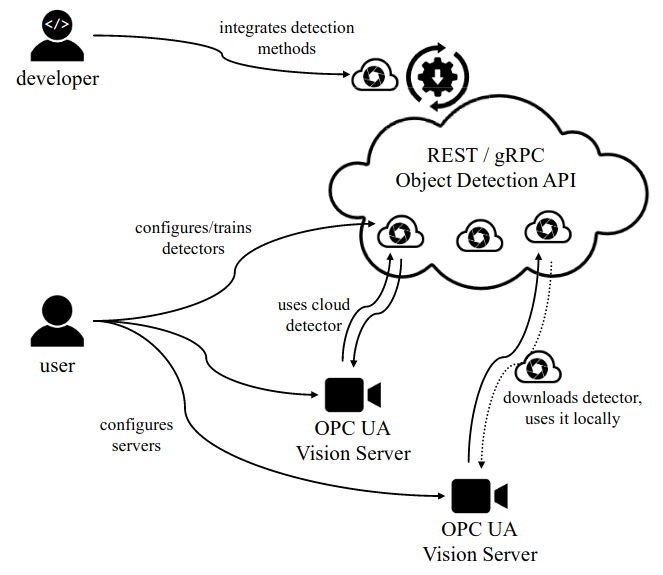
service-based architectures for machine vision
object detection and 6d pose estimation
- point pair feature matching
- render and compose synthetic images to generate training data for Deep-Learning-based methods